[논문 리뷰] Instances as Queries (Cont.)
728x90
반응형
<Instance Segmentation 모델 리뷰>
Instances as Queries 모델을 이해하기 위해서는 이해해야할 모델이 참 많다 ㅎㅎ..
0. Mask R-CNN 요약
첫 번째 단계는 Region Proposal (물체의 위치를 찾는 일)
두 번째 단계는 Region Classification (물체를 분류하는 일)
- Feature Extraction (feature map 생성)
- Region Proposal Network (Region Proposal - 카테고리와 무관하게 물체의 영역을 찾는 모듈)
- Feature Maps 위에 n*n spartial window를 슬라이드
- sliding-window가 찍은 지점마다 여러 Region Proposal(Anchor) 예측 (k개)
- Bounding Box의 후보로 사용되는 상자
- Classification : 모든 anchor마다 foreground, background 분류 (물체가 있나 없나)
- Anchor가 ground truth box와 IoU가 가장 크고 0.7 이상이면 foreground, 적으면 background
- Bounding box regression
- Region of Interest Pooling
- RPN을 지나면 서로 다른 크기의 proposed region이 나온다. 서로 다른 크기의 region을 동일한 크기로 맞추기 위해 RoI Pooling을 사용
- NMS(Non-Maximum Suppression)를 거치고, RoI Sampling을 통해 최종 RoI를 결정
- proposals의 갯수를 줄이도록 한다.
- NMS를 간단히 설명하면 먼저 IoU값으로 proposals을 모두 정렬시켜 놓고, RoI점수가 가장 높은 proposal과 다른 proposals에 대해서 overlapping을 비교한 뒤, overlapping이 높은 것은 특정 threshold이상 이면 지워버리는 과정을 반복한다.
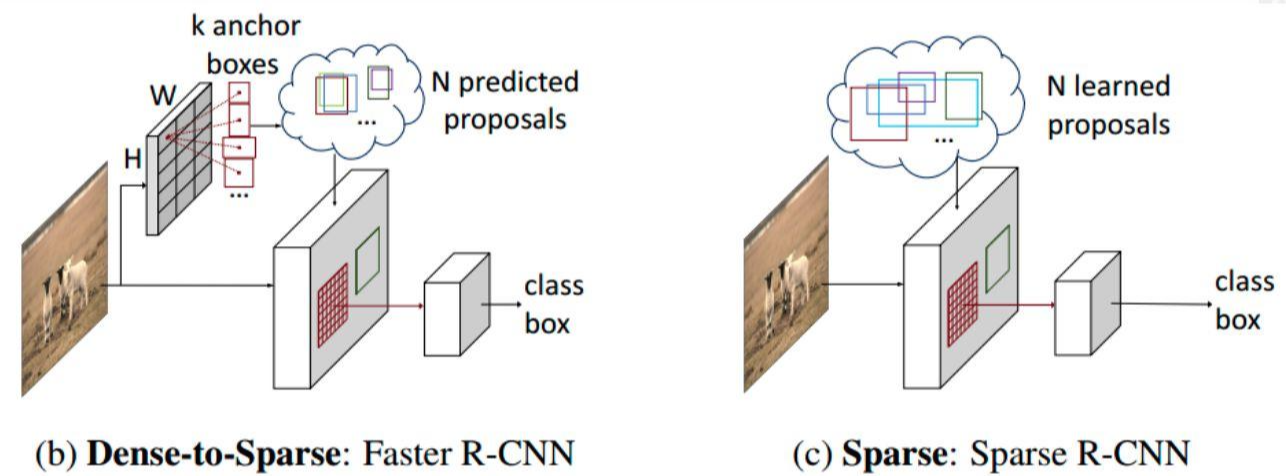
1. Sparse R-CNN 요약
- End-to-End Object Detection : output (final predictions)은 NMS 후처리가 필요 없음
- 생성된 feature map에서 k개의 Region Proposal(Anchor) 예측에서 HWk (수십만)개의 anchor (Bounding Box의 후보로 사용되는 상자)를 N(100)개로 축소
- RPN => Learnable proposal box (고정된 개수(대략 100개) 물체의 영역을 찾음) 로 변경
- proposal boxes
- proposal features
- Dynamic instance interactive head (6 steps)
- RoIAlign -> box feature extraction -> next step의 proposal boxes와 proposal features로 들어감
- Final prediction generation

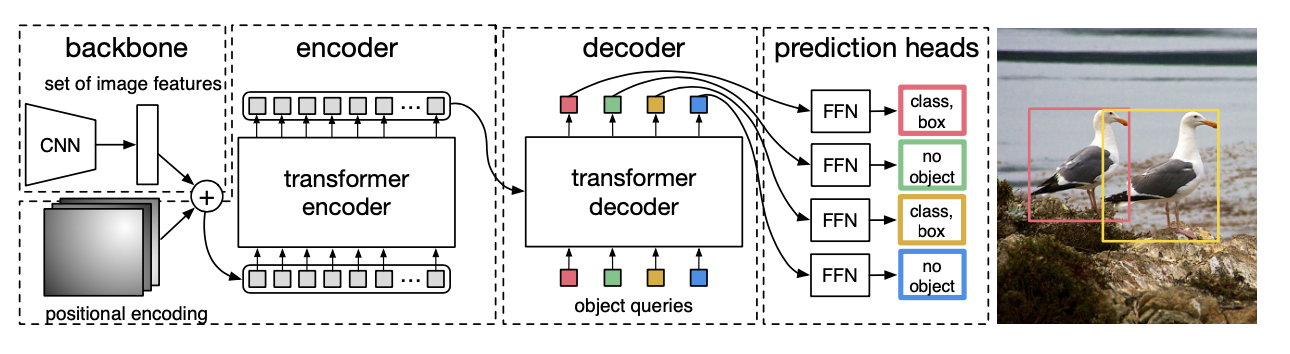
2. DETR (End-to-End Object Detection with Transformers) 요약
- CNN으로 feature map 생성
- positional encoding (상대적 위치정보 / sequential 한 output)
- 트랜스포머 인코더
- 이미지의 특징 정보를 포함하고 있는 각 픽셀 위치 데이터 입력받음
- 디코더
- input으로는 N개의 object query가 들어감 (점점 학습)
- 인코딩된 정보 활용
- 각 object query는 이미지 내에 서로 다른 고유한 인스턴스를 구별 (n개의 서로 다른 instance)
- Global attention : 이미지의 말단 부분의 attention score 값이 높게 형성 : 인스턴스 클래스와 경계선 추출
- NMS나 앵커를 생성하는 과정을 효과적으로 제거
- 모든 object를 한번에 예측
3. QueryInst (Instances as Queries)
- 위의 두 모델 짬뽕?
- Query based end-to-end instance segmentation
- 1. Query based Object Detector
- 6 query stage
- Stage t 에서 Pbox (pooling 연산자)가 이전 stage의 bbox 예측값 & FPN feature를 사용해 현재 stage의 bbox feature를 추출
- Multi-head self-attention module 이 input query 받아서 transformed query 출력
- Box dynamic convolution module이 위 두개의 input 받아서 bbox feature 업데이트하고 다음 stage에 bbox 예측값으로 들어감
- 2. Dynamic Mask Head]


참고 :
Sparse R-CNN https://junha1125.github.io/blog/artificial-intelligence/2021-04-27-Sparse-R-CNN/
Mask R-CNN https://mylifemystudy.tistory.com/82
DETR
https://yskim0.github.io/paper%20review/2020/11/17/DETR/
728x90
반응형
'AI Research Paper Review > More' 카테고리의 다른 글
| [논문 리뷰] EfficientNet 정리 (MobileNet 부터 EfficientNet 까지) (0) | 2021.06.03 |
|---|